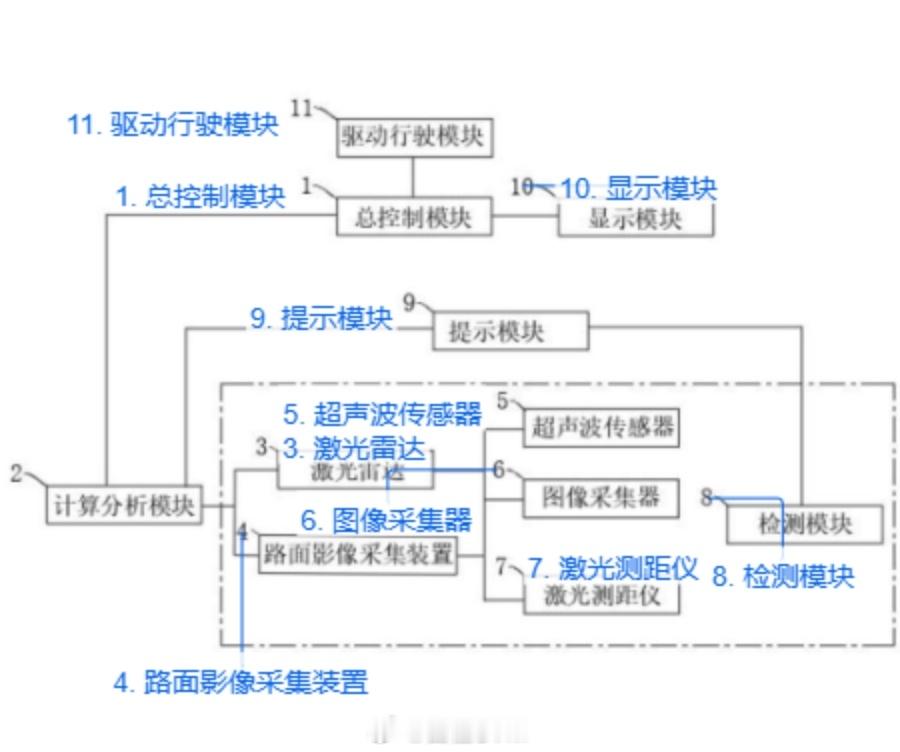
吕俭的汽车科普圈 今天聊聊辅助驾驶怎么躲低矮危险边界。常见的低矮危险边界,一个是窨井盖,一个是没有护栏的河道。解决问题的基本逻辑不复杂——更强的感知能力、更全面的算法。但现在哪家都说自己感知硬件厉害,算法是多么突出。所以具体是怎么一回事,我想我们需要花一点时间来讨论下。首先一点,激光雷达在识别窨井盖和河道边界比其他类型的感知硬件更有优势吗?这是毫无疑问的。比如吉利大学的一份专利——基于自动驾驶的避障方法和装置CN118170137A,提到了这个思路。这个专利的大致意思是,窨井盖通常具有特定的尺寸和形状,比如圆形、方形,且与地面齐平或略高于或低于地面。激光雷达可以通过点云数据精确测量窨井盖的尺寸、形状以及与地面的相对高度,有助于区分窨井盖与其他类似物体,比如路面标志、垃圾桶等。插个题外话:其实不仅是汽车领域,现在在城市路政和水利研究领域,也都在积极探讨采用激光雷达的无人检测技术。当然,我们也不能否定摄像头的价值。摄像头可以提供丰富的纹理和颜色信息,帮助识别窨井盖的表面特征和河道边界的视觉标志。总之了,通过结合激光雷达和路面影像采集装置的检测技术,可以有效解决自动驾驶车辆难以规避低矮障碍物的问题。与此同时,激光雷达的布局也很关键。我们现在量产车上使用的激光雷达都是固态激光雷达,不是机械式激光雷达。也就是说,它不能360°旋转的。换言之,激光雷达也会有视觉盲区。这也是为什么激光雷达除了头顶布置外,还有翼子板两侧布置、车头布置,外加车尾布置的情况。比如我的问界新M7,是有后向固态激光雷达的。除了这些,算法层面也很关键。我之前聊过WEWA的特点,这种模型架构的一大优势是极端环境更可靠。云端的世界引擎会用AI不断生成各种稀奇古怪的路况,像是暴雨、浓雾、井盖不见了的路口,全都拿来做仿真训练;车端的世界行为模型再把激光雷达、视觉、毫米波雷达这些感知融合起来,做出更贴近人、甚至超过人反应速度的决策。至于防碰撞能力,华为这次用的是CAS 4.0,全维的。靠舱内的激光视觉加毫米波雷达,能把地面那些又矮又不显眼的障碍物看得更清楚。碰上雨雪天,它依然能在高速下识别到 30cm的路沿或井盖。总之啦。辅助驾驶躲低矮危险边界是很重要的一个课题,甚至可以作为技术分水岭来看待。