学习了一下小鹏汽车自动驾驶产品高级总监最近发的文章,有几个信息点和大家分享一下。
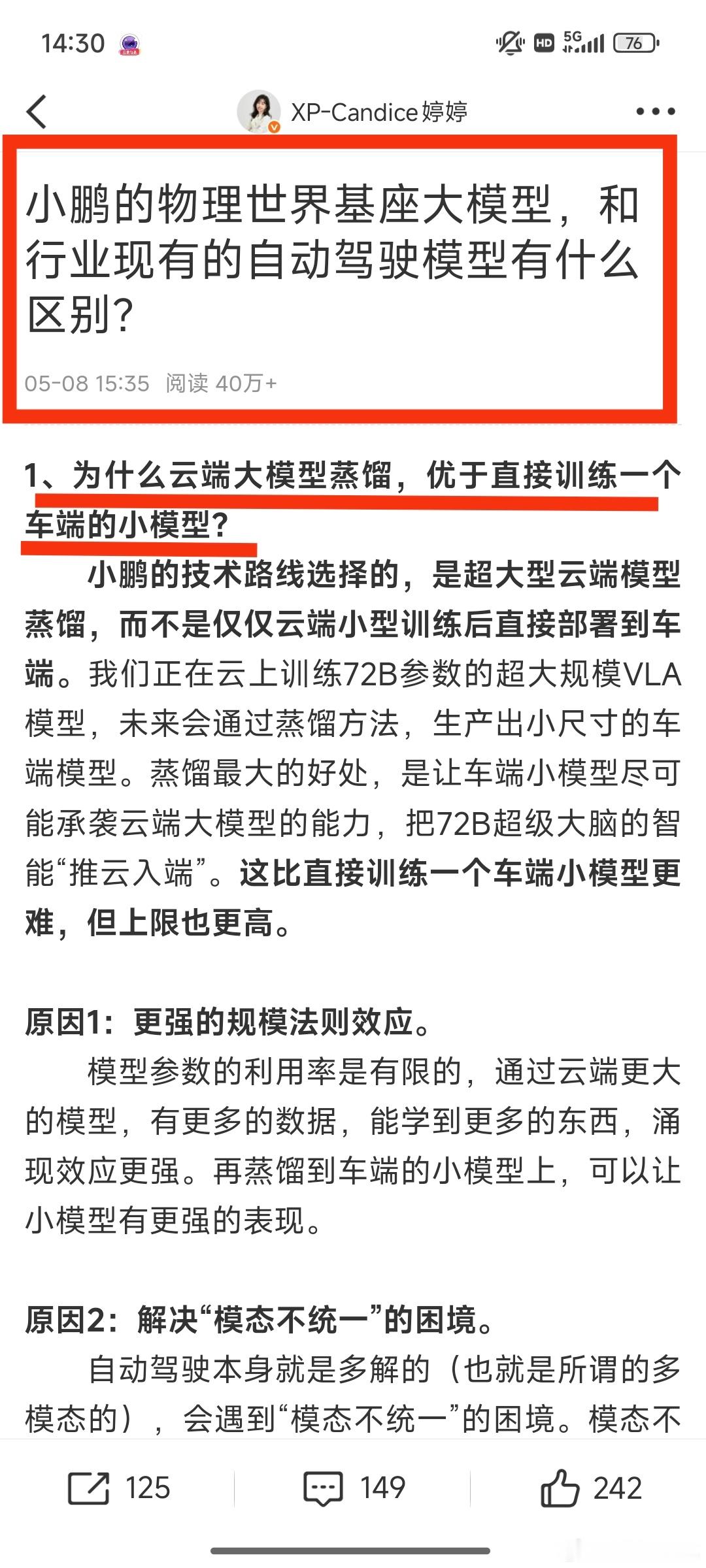
1. 端到端智驾在往更大训练数据量发展的时候会遇到「模态不统一」的问题。
怎么理解这个问题呢,智驾的一个场景就像数学题,以前你只学了加减乘除,你可以很好的去解这个题,但是现在学了方程、微积分,也可以解这个题,但是有可能出现知识学杂了,反而解得不如以前好了的问题。
小鹏的解法是云端训练了更大的模型,使模型有更大的参数量,更强的能力,这个模型作为老师,去教车端的模型学习,就会有「模态统一」的优势。
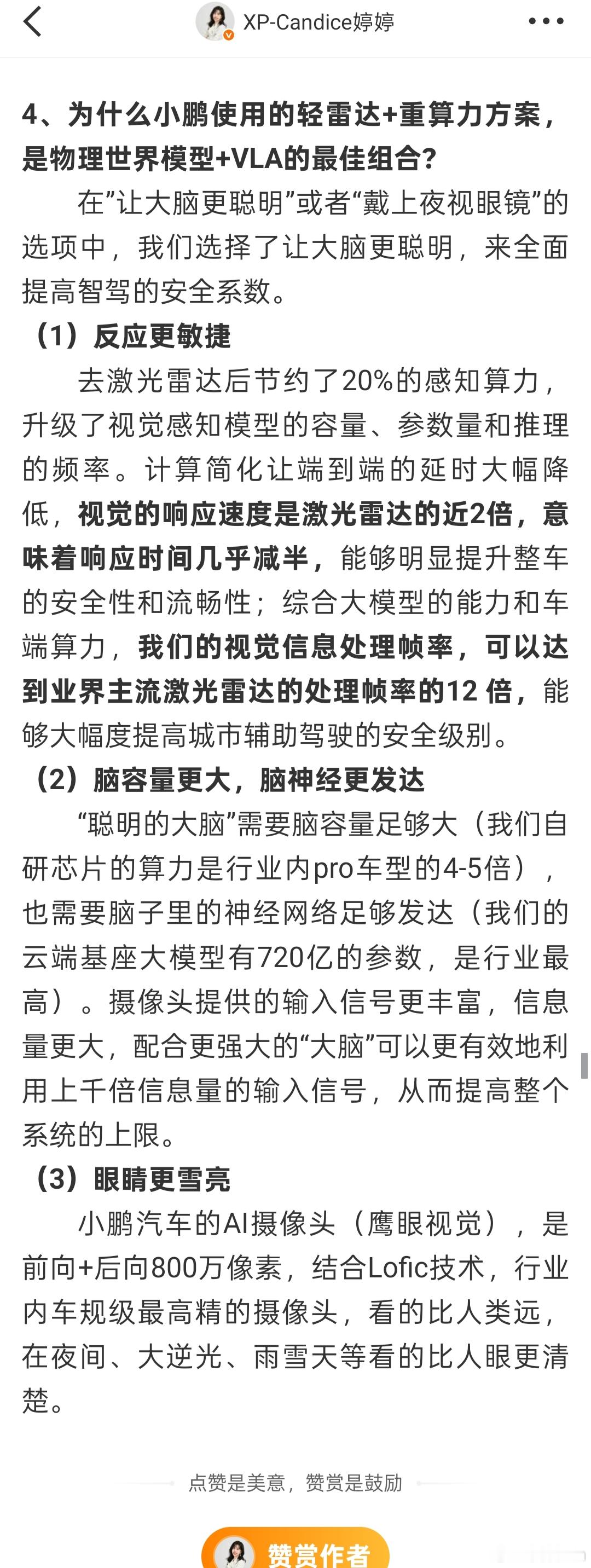
2. 小鹏去掉了激光雷达之后,大概可以节约 20% 的感知算力,从而可以提升视觉感知模型的容量、参数量和推理的频率。带来的好处是响应更快,延迟更低。