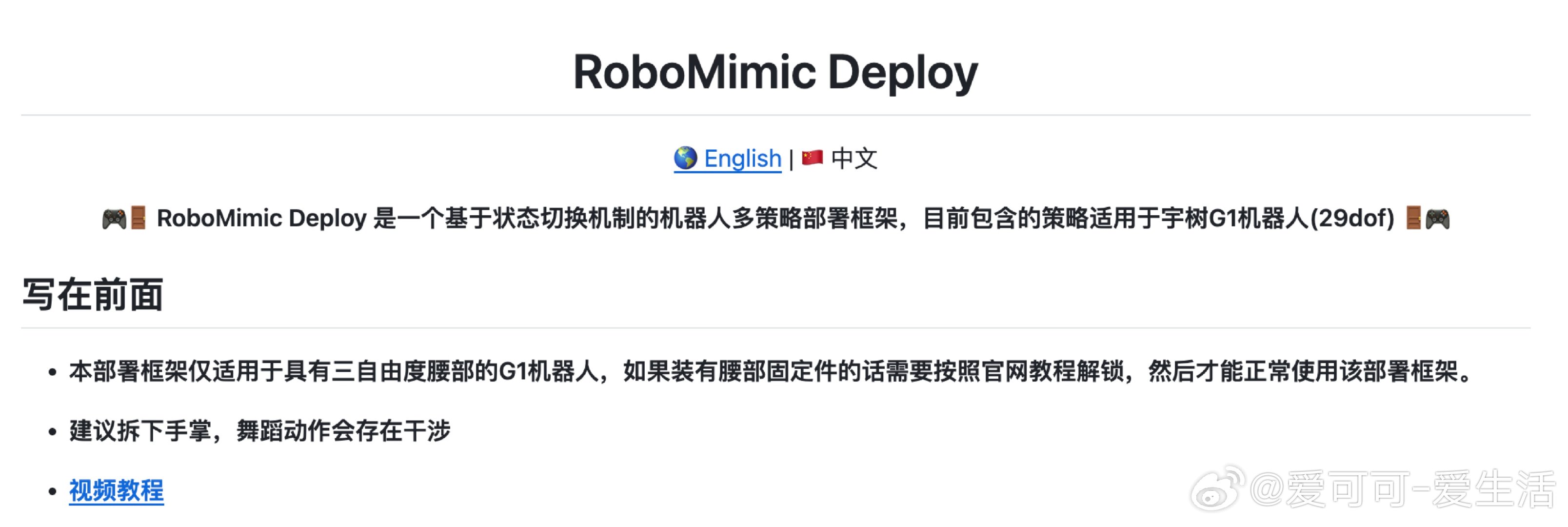
【[116星]RoboMimic_Deploy:基于状态切换机制的多策略机器人部署框架,专为Unitree G1机器人(29自由度)设计。亮点:1. 支持多种运动模式,如稳定行走、舞蹈、武术动作;2. 提供模拟与真实机器人操作指南;3. 兼容PyTorch,支持神经网络模型训练与推理】
'RoboMimic Deploy is a multi-policy robot deployment framework based on a state-switching mechanism. Currently, the included policies are designed for the Unitree G1 robot (29-DoF).'
GitHub: github.com/ccrpRepo/RoboMimic_Deploy
机器人部署 多策略框架 Unitree机器人 人工智能 ai兴趣创作计划
![宇树机器人倒下了[doge]机器人](http://image.uczzd.cn/12899373563664171064.jpg?id=0)

![层层转包后发现竟是中国产品贴牌?[捂脸哭]韩国爆了个大新闻:LG开发的AI护理](http://image.uczzd.cn/1831726989034027881.jpg?id=0)

![这ai太逼真吗?[赞][赞]ai](http://image.uczzd.cn/422974456033376523.jpg?id=0)
