技术巡猎 理想汽车 一种自动泊车方法、装置、设备、存储介质、产品及车辆。自动泊车真正难看的地方,是最后那几十厘米,尤其是室外停车位。很多车位比路面高一点,前面有个小台阶,看着也就几厘米,普通人自己开车时一脚油门、一脚刹车,靠经验就过去了。但自动泊车遇到这种场景,事情会变得很微妙。因为系统既要让车爬上去,又不能爬上去之后往前一窜;既要保证泊车成功,又不能让坐在车里的人觉得它像个刚拿驾照的新手。
理想这件专利,讲的就是这个很具体的细节。
停车位高于路面,台阶常见在5cm左右,少数能到7-8cm。车辆泊入时,如果后轮已经上了台阶,前轮还顶在台阶下,本质上相当于给车辆起步额外加了一个坡。这个时候,系统必须给更大的驱动力,否则车就卡在那里,上不去。
但问题在后半段。
车一旦靠大驱动力翻过台阶,速度很容易起来。停车位空间又短,旁边往往还有墙、花坛、路沿石、其他车辆。用户坐在车里,雷达一响,车还在往前拱,心理压力会很大。很多人会下意识踩刹车接管,于是自动泊车失败;如果用户不接管,系统再用一个比较大的制动力把车刹住,结果就是“猛冲一下,再重刹一下”。
这类体验,参数表上看不出来,但用户会记得很清楚。
所以这件专利的思路,其实是在解决自动泊车里的“驱动和制动衔接”问题。
专利方案先做一件事:响应自动泊车指令后,确定车辆的初始起步驱动力。这个驱动力不是随便给的,而是结合起步加速度、车辆实际质量、起步坡度去算。简单理解,车越重、坡越大、起步所需加速度越高,系统给的起步驱动力就要越大。
背后的含义很直接:自动泊车不能只按一个固定油门走天下。空车和满载不一样,平地和坡道不一样,轮胎抵着台阶和正常起步也不一样。控制系统如果不理解这些差异,最后就只能靠保守策略,要么推不上去,要么推得太猛。
接下来,系统识别到泊车轨迹里有台阶,就会增大驱动力,让车辆沿泊车轨迹继续运动。这个阶段的核心目标很单纯:先过坎。
但专利真正有意思的地方,不在“加力过坎”,而在“过坎之后怎么收”。
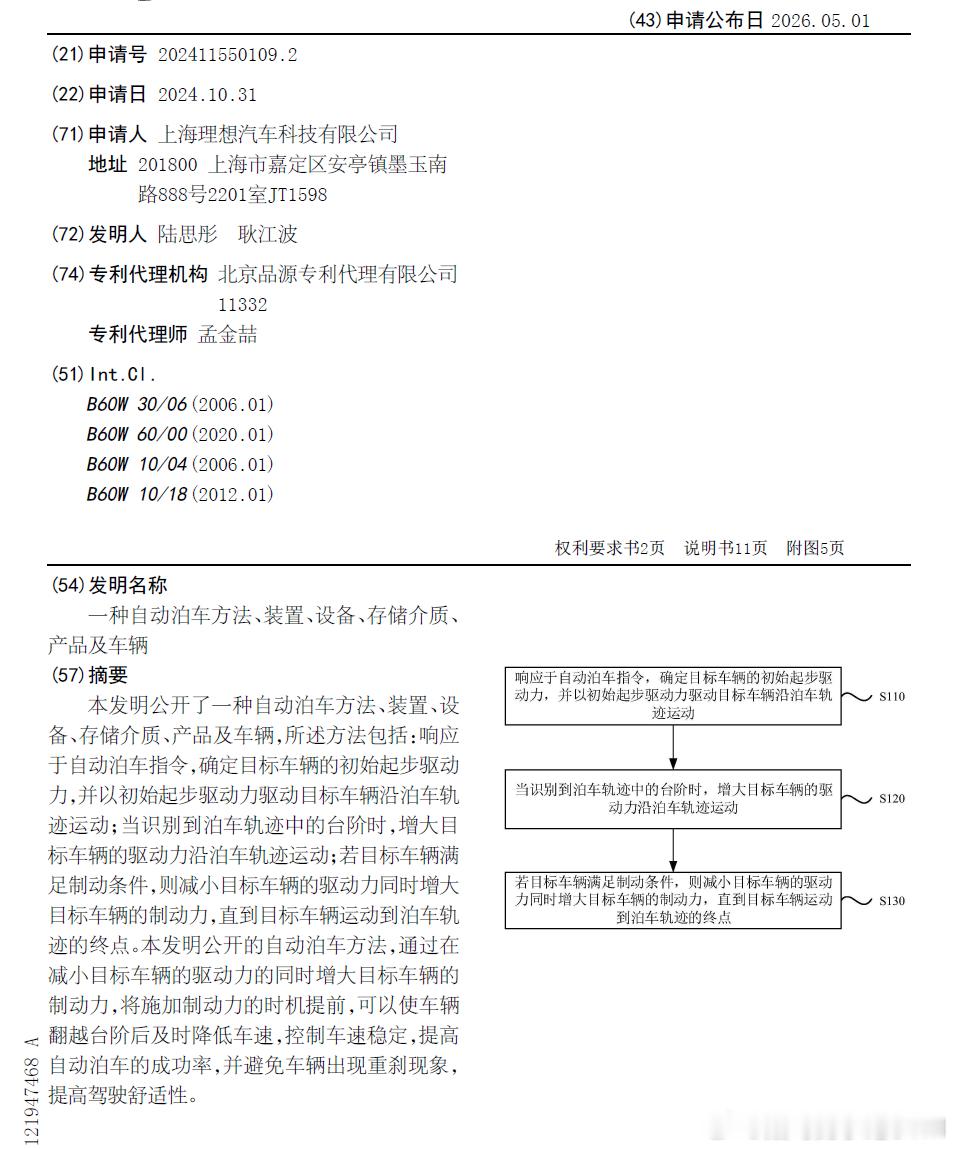
传统做法更像是:先把驱动力加上去,让车翻过去;等驱动力减到零之后,再用较大的制动力把车停住。图2里表达的就是这种逻辑,驱动力先上升再下降,制动力在后面才明显介入,车速也会先被抬起来,再被压下去。
这就容易形成一种很机械的动作:前面憋着劲儿冲,后面突然刹。车确实可能停住,但人坐在里面会觉得不太体面。
理想这个方案把制动时机提前了。
当车辆满足制动条件,比如当前驱动力已经大于设定阈值,同时车速也超过某个车速阈值,系统就判断车辆大概率已经具备翻越台阶的状态。这个时候,不再等驱动力完全归零,而是开始一边减小驱动力,一边增大制动力。
这个动作听起来很小,但工程意义不小。
它相当于让车在“还在用力往前爬”的时候,就开始提前准备把速度压住。驱动力不是一下子撤掉,制动力也不是突然砸上来,而是两边做一个交接。专利里还提到,可以按照第一速率减小驱动力,同时按照第二速率增大制动力,直到实时车速降到目标泊车车速,再按目标泊车车速走到泊车轨迹终点。
这就像一个老司机过台阶。
不是一脚油门把车拱上去,然后发现快撞了再一脚刹车。而是车轮刚越过去,脚底已经开始收油,同时轻轻带着刹车,让车速慢慢落下来。外面看车走得稳,里面坐的人也不会被点头感折腾。
更细一点,专利还写了一个提前预制动的逻辑:当车速大于某个阈值时,可以先给一个小的目标制动力,而且这个制动力小于设定制动力阈值。翻译成人话,就是制动系统可以先“挂个预备状态”,不是真的大力刹,而是让制动响应提前进入状态。后面真需要制动时,不至于从零开始反应。
这个地方很像底盘控制里的“预加载”思路。
很多体验差异,不是最后那个动作有没有,而是系统有没有提前半拍准备。普通用户不会知道第一速率、第二速率,也不会关心驱动力阈值、车速阈值这些标定参数。但他能感觉到,车是稳稳爬上去、稳稳停住,还是突然一冲一刹,把人吓一跳。
自动泊车到了今天,能不能识别车位已经不是唯一重点了。真正拉开体验差异的,往往是这种低速、窄空间、带障碍、带坡坎的边角场景。
因为这些场景很不标准。
商场地下车库的车位相对规整,室外停车位就复杂多了。路沿石高度不一致,地面坡度不一致,车位长度也不宽裕。有的地方前面是墙,有的地方旁边是绿化带,还有的地方台阶和斜坡混在一起。人类司机靠感觉能处理,但自动泊车系统必须把这些“感觉”拆成感知、判断、驱动、制动、标定和安全边界。
这也是这类专利值得看的地方。用户对智能驾驶的信任,很多时候不是来自一次惊艳表演,而是来自很多次“不吓人”。自动泊车也是一样,车能泊进去只是基础,过程像不像一个成熟司机,才是用户愿不愿意继续用的关键。