MIT 和意大利巴里理工大学的研究人员最近开发出了一种电控流体纤维肌肉。它彻底抛弃了笨重的电机和吵闹的液压泵,让机器人不仅能像生物一样拥有“线条感”,还能在发力时保持绝对的安静。
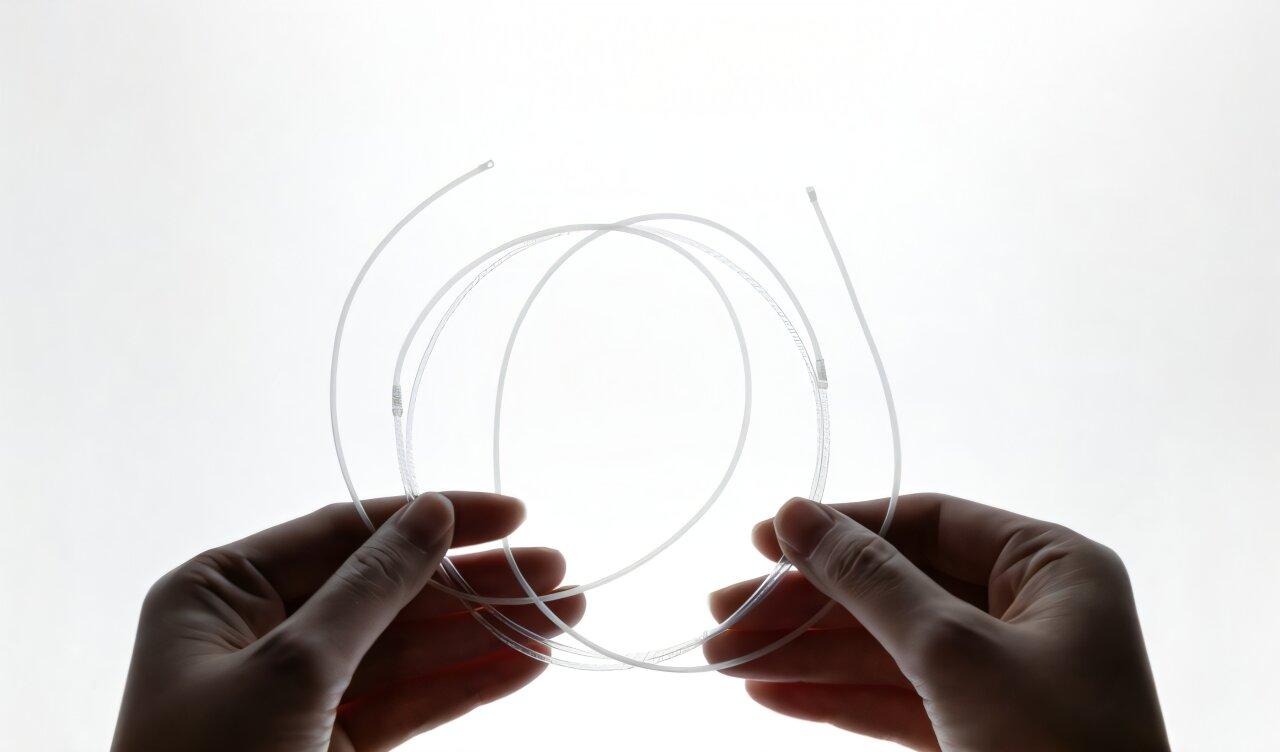
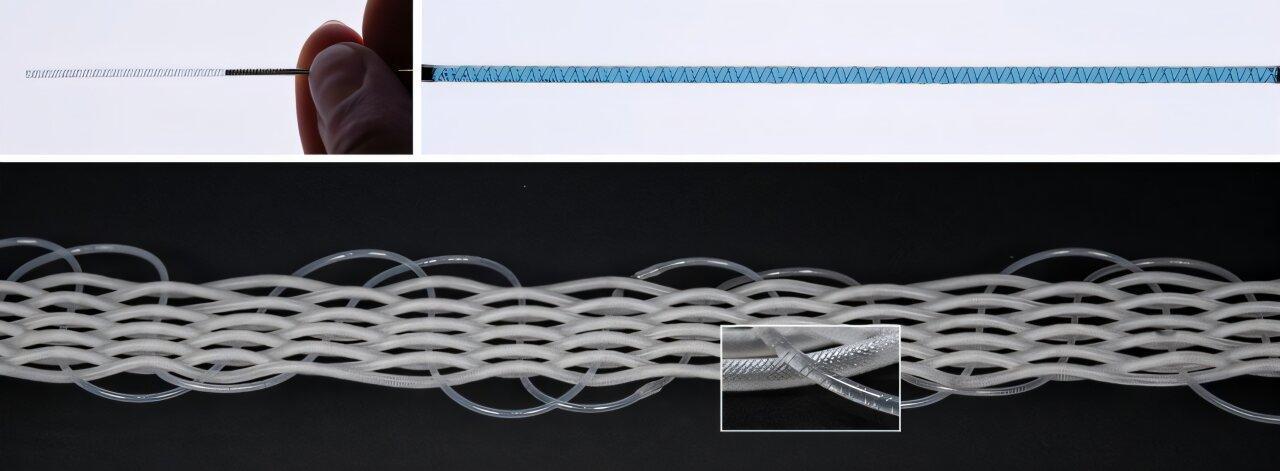
传统的机器人(比如波士顿动力的机器狗)动起来总是伴随着电机的嗡嗡声或液压的嘶嘶声。这次研发的电控流体纤维肌肉(Electrofluidic Fiber Muscles)是一种全集成的软体驱动器。它只有牙签粗细,却能像真正的肌肉束一样编织成各种形状,直接把电能转化为线性力量,甚至能温柔地跟人类握手。
所以,它是怎么做到的?
首先,研究人员利用了电混流体力学(EHD)原理。这种微型泵没有活塞或转子,而是通过向介质流体中注入电荷,利用电场拖拽离子运动来产生压力。它把笨重的“外部泵站”缩小成了毫米级的“纤维内胆”。这意味着驱动系统不再是一个沉重的背包,而是像血液循环系统一样,分布在每一根肌肉纤维里。
在设计上,它模仿了人体肱二头肌和肱三头肌的原理。当纤维泵把流体抽进一根纤维(收缩)时,流体正好从另一根纤维里排出(伸长)。这种“一对一”的对抗逻辑解决了一个巨大的工程难题——流体往哪儿放? 以前的液压系统需要一个外部油箱,而这种拮抗设计让流体在内部循环,实现了一个完全封闭、无需外挂储液罐的自持系统。
但是,如果泵抽得太狠,流体压力降得太低,会产生气泡(空化),导致系统崩溃甚至电击穿。于是科学家给系统加了一个“偏置压力(Bias Pressure)”。通过调节这个基础压力,可以像调吉他弦一样切换性能:压力高一点,反应速度更快;压力适中,收缩力量更大。这种物理层面的参数调节,让肌肉具备了极强的任务适应性。
这种技术让机器人从堆砌零件变成了编织结构。因为它是线性的、静音的且柔软的,它将成为外骨骼和仿生假肢的理想选择——它能像一件背心一样贴合人体,而不是像一套僵硬的盔甲。