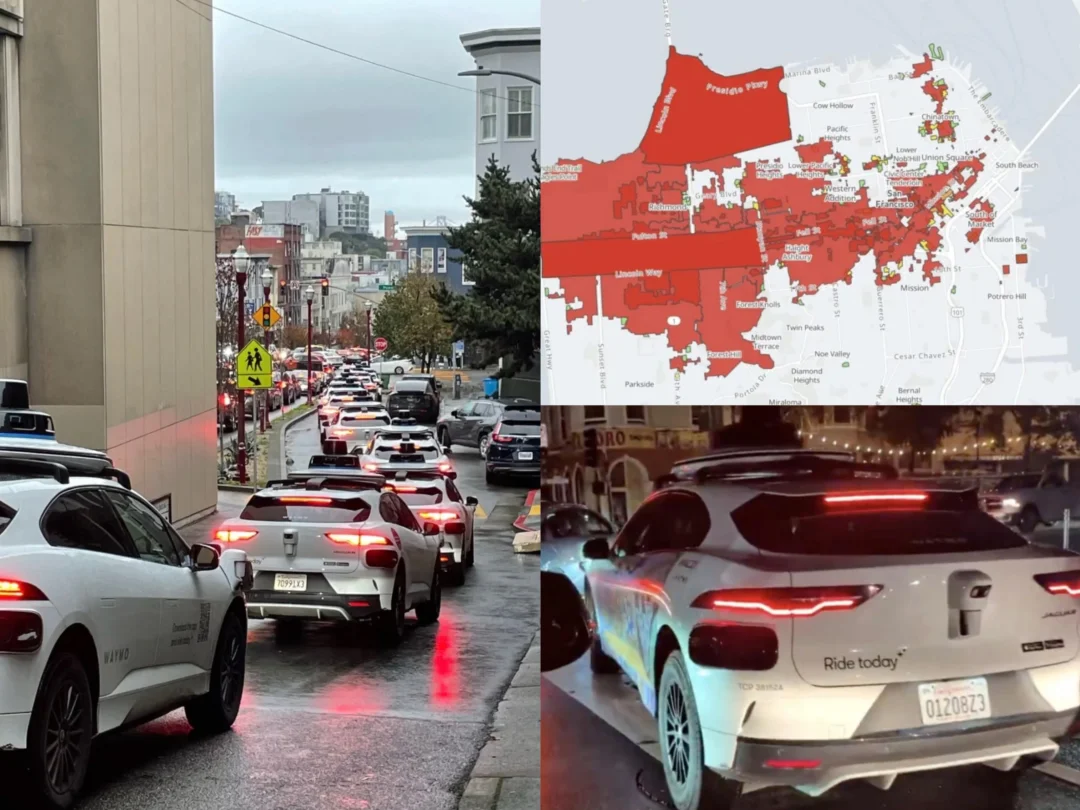
类似情况在国际上也出现过。2025年12月,Waymo在旧金山因大规模停电导致交通信号失效时,多辆无人车同样触发了原地停车策略。
这类事件的本质,是自动驾驶系统在极端场景下启动安全冗余设计的体现,类似航空领域的多重备份机制,旨在确保系统在不确定环境中优先保障人员安全。
无人驾驶从诞生起就伴随着持续的讨论,无论是技术路径、场景落地还是安全问题,都在讨论中逐步完善。正如所有新兴技术一样,规模化落地必然经历极端场景的考验。
当前无人驾驶仍处于快速发展阶段,在关注规模扩张的同时,我们更应将目光投向安全本身——关注企业在安全冗余上的设计投入、在长尾场景中的应对能力,以及在每一次偶发事件后的响应与迭代。
技术的进步需要时间,安的边界需要共同守护。唯有将安全置于首位,无人驾驶才能赢得更广泛的信任,真正走向可持续的规模化应用。
无人车萝卜快跑无人车安全