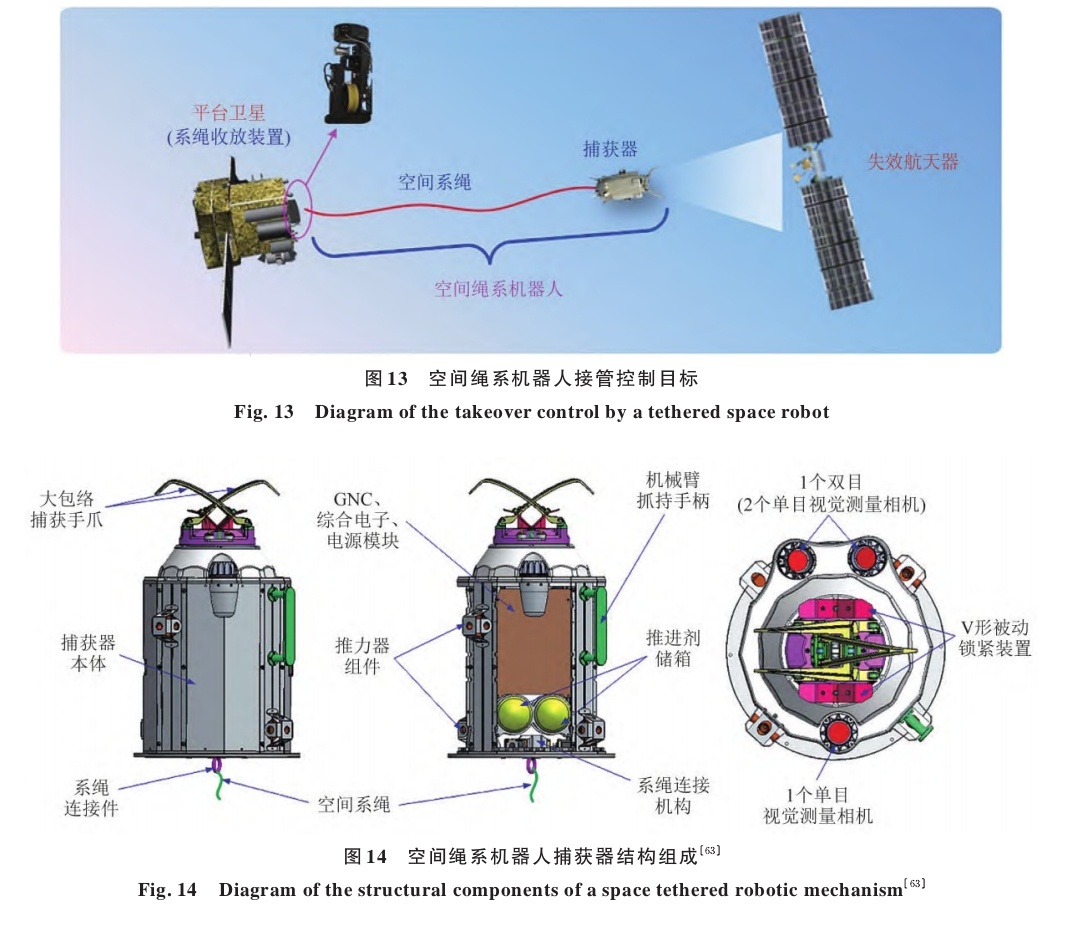
西北工业大学研制的国际上首款空间绳系机器人系统,该系统由安装在平台卫星上的系绳收放装置,空间系绳及捕获器 3部分组成。将微纳卫星的强机动能力以及平台卫星的强控制能力有机地结合在一起,具有操作距离远(捕获距离可高达200m),安全性高(无需平台抵近操作),平台和捕获器之间依靠柔性系绳连接,对平台影响小、灵活性强(捕获器带有自主机动能力)等突出优势,是捕获失稳,具有旋转速度快和失效航天器以及非合作目标的绝佳选择。
图源:《失效航天器接管控制技术发展综述》
西北工业大学研制的国际上首款空间绳系机器人系统,该系统由安装在平台卫星上的系绳收放装置,空间系绳及捕获器 3部分组成。将微纳卫星的强机动能力以及平台卫星的强控制能力有机地结合在一起,具有操作距离远(捕获距离可高达200m),安全性高(无需平台抵近操作),平台和捕获器之间依靠柔性系绳连接,对平台影响小、灵活性强(捕获器带有自主机动能力)等突出优势,是捕获失稳,具有旋转速度快和失效航天器以及非合作目标的绝佳选择。
图源:《失效航天器接管控制技术发展综述》

作者最新文章
热门分类
科技TOP
科技最新文章