在科幻电影中,手术机器人总能精准无误地完成各种复杂操作。然而在现实中,要让机器人实现如此稳定可靠的精巧操作,却一直是科学家们攻坚的难题。
传统解决方案依赖于复杂的电子力传感器和算法,但这带来了成本高昂、在狭小或特殊环境中可靠性不足等问题。
有没有一种更简洁的解决思路?
近日,浙江大学航空航天学院交叉力学中心杨卫院士、李铁风教授、杨栩旭研究员团队与浙江大学医学院附属邵逸夫医院蔡秀军院士团队协作,联合多个学科交叉研究一项研究成果,作为封面文章登上国际顶刊《Nature》。研究团队从“系鞋带”这个日常动作中汲取灵感,开发了一种基于滑结的机械智能传动机制。创新性提出“Sliputure”——活结智能缝线,成功将其应用于外科缝合,并有望指导其他机器人和智能结构设计。
这项技术无需任何电子传感器和复杂程序,就能让机器人与医生以95.4%的超高一致性传递和感知力度,仿佛被赋予了与生俱来的肌肉记忆。临床实验表明,此项技术能让初级外科医生的手术打结力精度飙升121%,比肩资深医学专家。

这究竟是如何做到的?又将为机器人领域带来怎样的革命?
横在机器人面前的一座大山:难以捉摸的“手感”
无论是精密装配还是机器人手术,“力控”一直是机器人走向更高自主性的核心瓶颈。
在工业领域,抓取力度过大会损坏精密零件,过轻则无法完成任务。
在医疗领域,尤其是胃肠外科手术中,缝合打结的力度至关重要:用力过猛会导致组织缺血坏死;用力不足则可能导致吻合口漏,进而使患者死亡率增加30%以上。
当前的机器人系统,大多依赖视觉反馈和预设程序,本质上是一种盲操作。医生通过观察组织形变来间接判断力度,个体差异大,难以标准化。而加装力传感器则面临空间限制、成本高昂、在体液环境中可靠性下降等一系列挑战。
科研团队将目光投向了古老的绳结,试图从“机械智能”中寻找答案——不靠电路和代码,而是通过结构设计本身,让机器身体自带智能。

拉伸试验:滑结如何成为机器人的触觉神经?
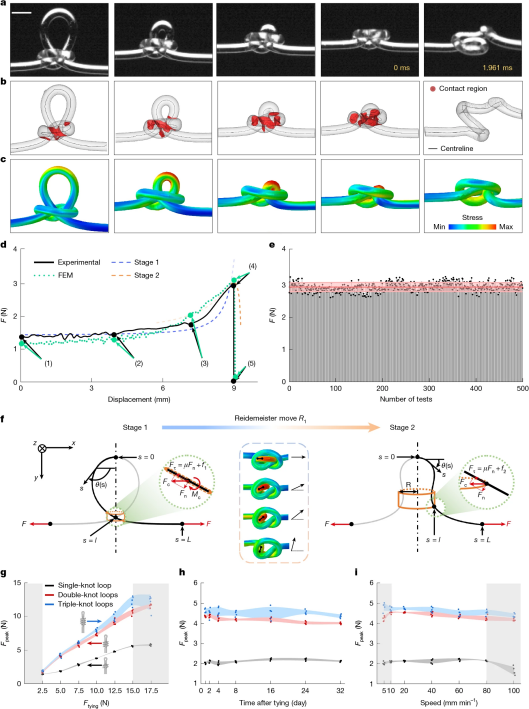
研究团队通过一套精密的实验体系,系统揭示了滑结作为机械力控制器的物理本质。在严格控制的实验环境下(21℃),使用3D打印绕线板实现滑结的标准化制备,通过施加精确预紧力,并借助高速摄影(11,000帧/秒)和微型CT(1.3µm分辨率)实时捕捉其构型演变过程,完整呈现了滑结从“应变储能”到“拓扑突变”的精准力学程序。
这套系统的核心是一个精妙的力学闭环,通过三个步骤实现力的精准控制:
写入:制作时施加的预紧力将“力密码”编码进绳结的拓扑结构、接触摩擦和弹性形变中;
存储:滑结的独特几何结构与内部摩擦力构成稳定的“机械锁”,长期保持预设力信息;
读取:拉动自由端至临界点时,滑结发生拓扑跳跃,释放出高度一致的峰值力(Fpeak)。
为全面验证滑结的可靠性,研究团队设计了严苛的测试,其卓越稳定性被充分验证:
√在500次重复测试中,峰值力的一致性高达95.4%;
√通过改变结环数、材料直径等参数,可像调节代码一样精确设定输出力值;
√在不同液体环境(合成血液、生理盐水等)中均保持稳定性能;
√即使存放32天,其“力学记忆”仍保持完好。
简单来说,滑结就像一个一次性的、纯机械的力控保险丝。机器人或医生只需执行简单的“拉”这个动作,当感受到滑结打开的信号时,就知道已经施加了恰到好处的力,无需任何电子传感与复杂计算。
实战验证:从手术室到机器人的革命性应用
为了验证滑结的实际效果,研究团队展开了多层次、跨维度的实验。
1.外科医生的神级辅助,新手秒变专家
滑结能够提供精准而牢固的机械传递,正满足了外科手术对操作准确性和一致性的核心要求。基于此,团队设计了一种“滑结缝合线”,将滑结与普通手术缝线串联。医生像往常一样打结,然后拉动滑结端直至其打开,预设的力便被精确传递到手术结上。
为验证其效果,团队招募了不同经验层次的外科医生,在硅胶模型上进行缝合测试。
结果令人振奋:使用传统缝线时,初级医生的打结力度分散,远逊于资深医生;而使用滑结缝线后,初级医生的打结精度竟提升了121%,其表现甚至优于使用传统缝线的资深医生。
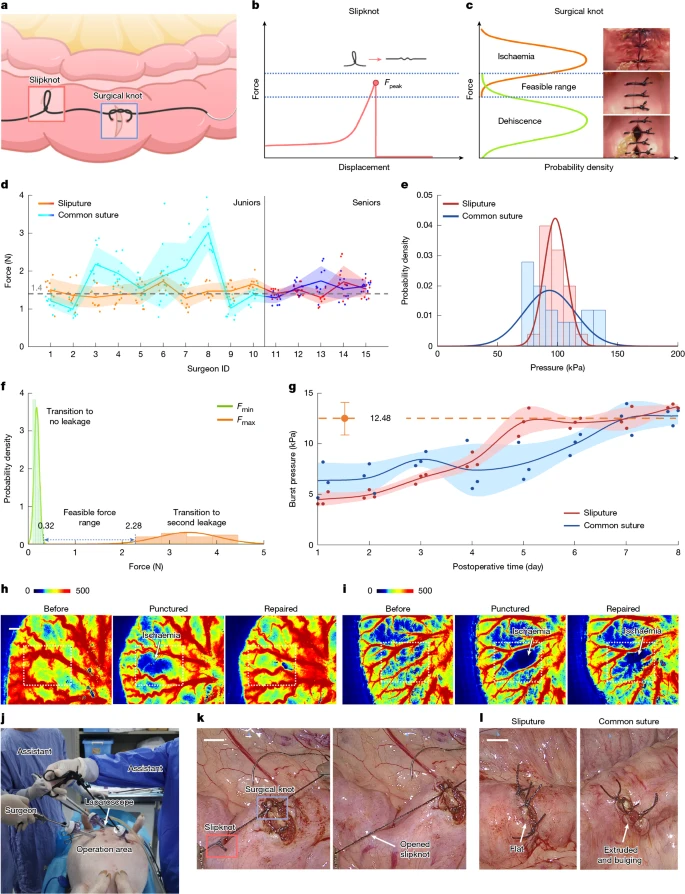
接下来,团队通过动物实验,进一步验证了滑结技术的优势。在大鼠模型上,与普通缝合相比,滑结缝合不仅能显著改善术后血液供应、减少组织粘连和渗漏,更使伤口愈合速度比普通缝合提前2天。该技术随后在更复杂的猪腹腔镜手术中也取得成功,精度比普通缝合提升了71.3%。
2.手术机器人能看见力度,实现智能缝合
研究团队将滑结系统集成到了机器人手术中,并开发了一套基于视觉的自动制动系统。具体来说,就是系统确保缝合线与机器人无缝连接,并采用实时图像处理技术检测滑结,当人机协同执行缝合时,摄像头实时追踪滑结的形态变化。一旦算法识别到滑结被拉开的关键视觉特征,系统会立即向机械臂发送停止指令。
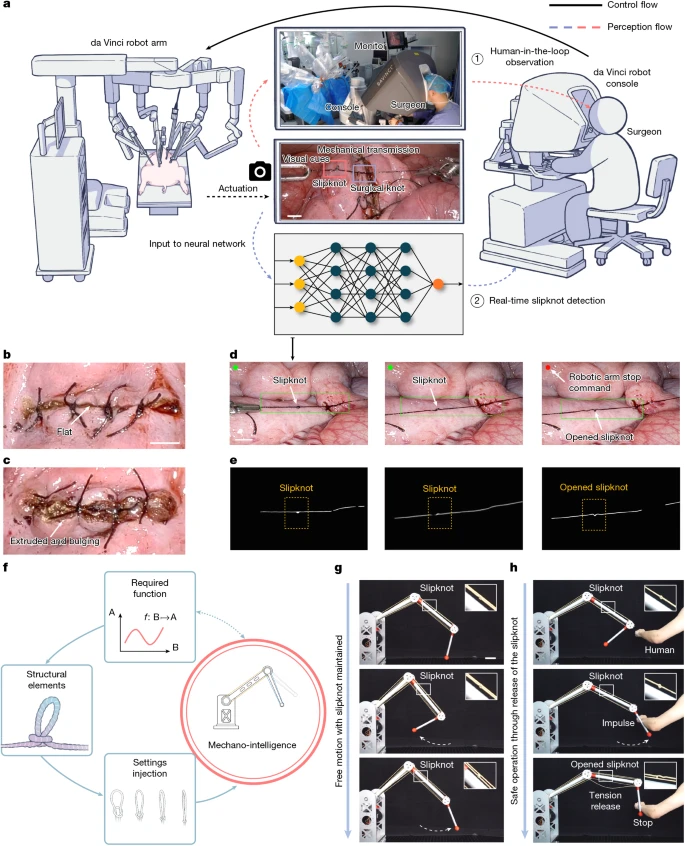
效果同样显著,这使得原本没有触觉的机器人手术系统,能够自动、精确地控制缝合力度,避免了组织损伤,同时缝合压力的一致性显著优于传统方法。
目前,这种创新方法已在硅胶模型和活体猪结肠损伤修复模型中得到验证。
3.超越手术,为机器人装上机械保险丝
这项技术的应用远不止于医疗,还被扩展至机器人领域。团队将滑结集成到定制的四自由度缆索驱动机械臂中,将其设计为可调节的机械保险丝,也就是相当于一个过载保护装置。
当机械臂与人或环境发生意外碰撞,导致驱动力超过滑结的预设阈值时,滑结会迅速打开,中断行动,既能保护人员和易碎物品免受过大力的伤害,又能保护机器人部件因为过压受损。
值得注意是,这相较传统方案有一个重大突破:像一个即插即用的“外挂”,无需改装机器人本体,就能为其赋予精准的力控能力,实现无缝接入。
未来展望:机器人设计的无限可能
一个滑结的智慧,其边界究竟在哪里?
不止手术台,它所验证的机械智能范式,为整个机器人设计领域提供全新的思路。
一是通过精妙的结构设计替代部分复杂的电子传感与控制,大幅降低高端机器人的制造成本与门槛,使其在资源匮乏地区也能广泛应用。
二是充分发挥纯机械结构不惧电磁干扰、无需供电的特性,在太空、深海、野外救援等极端环境下具有无可替代的优势。
三是进一步探索类似滑结的力学行为,在仿生机器人、软体机器人等领域开辟新的方向。
一个绳结引发的思考,巧妙地解决了机器人领域长期存在的力控难题。可见,最高级的智能往往蕴藏在最朴素的自然物理原理之中。
论文链接:https://www.nature.com/articles/s41586-025-09673-w?sessionid=