当栖云蜂鸟的共轴双旋翼在蓝天盘旋时,其背后是实验室里无数次与“空气”的博弈:从毫米级的旋翼建模到精准的气流调控,每一次测试与优化,都是在破解共轴飞行的空气动力学密码,让每一度电都转化为持久的升力。

01实验室里的相亲 电机与电调交叉适配
要让共轴双旋翼发挥最大效率,首先得让“动力搭档”找到最佳契合点——电机与电调的每一次参数匹配,都可能成为决定气动效率的关键。就像相亲时需考量双方性格、习惯的适配度,电机的功率输出、响应速度,与电调的电流控制精度、散热能力,必须经过反复磨合,才能避免“动力内耗”,让能量高效转化为升力。
为了还原旋翼的真实气动特性,团队先用高精度 3D 扫描仪螺旋桨做了次 “全身 CT”:生成的.stl 网格文件精准捕捉了旋翼曲面的每一处弧度,再通过 Solidworks 搭建实体模型 —— 黄色的建模实体与扫描网格几乎完美重合,误差控制在毫米级以内。

高精度激光雷达扫描

螺旋桨逆向建模
团队随后搭建了“动力适配数据库”,对电机与电调形成近百组交叉适配组合。每一组“搭档”都要经过三轮严苛考验:
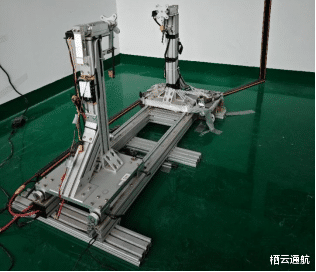
共轴双旋翼动力测试台
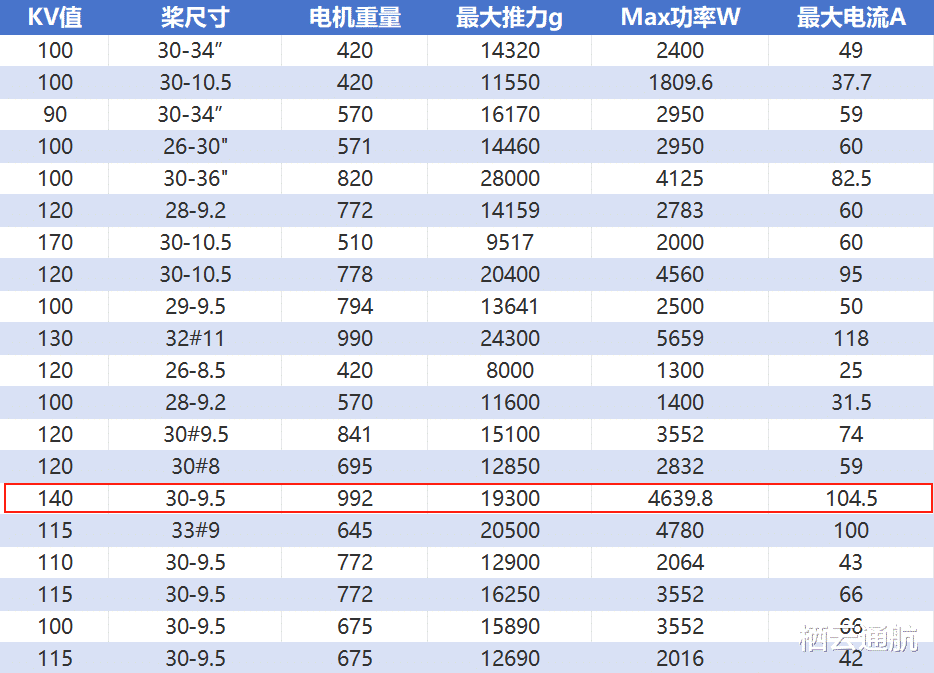
动力交叉匹配测试结果
第一轮:静态参数匹配:先核对电机KV值与电调持续输出电流的兼容性
第二轮:动态负载测试:将“电机-电调”组合安装在模拟共轴负载平台上,模拟8kg-12kg的实际载重场景。测试得到电机与电调的组合表现最优
第三轮:能效比筛选:通过功率分析实时监测每组组合的“输入功率-输出拉力”比。
02共轴的“气流困境
单旋翼的气动特性早已成熟,但共轴双旋翼的“气流特性”却藏着意想不到的谜题。
团队先从单桨测试入手:用边界层网格(500K+网格数量)和SST、K-epsilon两套湍流模型,还原了3000RPM下的气流轨迹——单桨的下冲气流速度稳定在13m/s以内,升力约6954g,扭矩3.4Nm,数据与实测偏差控制在15%以内。但当两副旋翼共轴旋转时,“麻烦”来了:
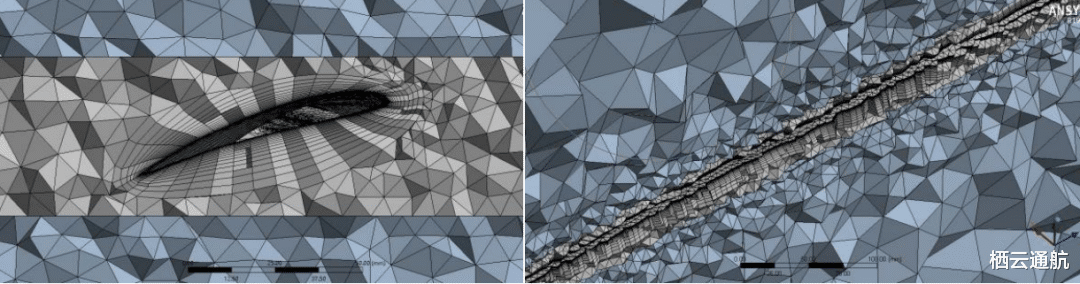
螺旋桨网格及边界层网格划分
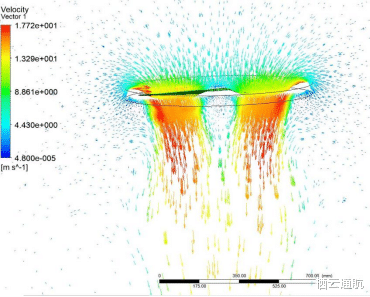
单螺旋桨仿真结果

单螺旋桨仿真数据
下桨的“气流困境”:上桨产生的下冲气流会直接吹向下桨,就像让下桨在“空气的乱流区”里工作——下桨叶素的攻角被迫减小,升力跟着打折,阻力却没减少。测试显示,未优化时下桨的升力仅为上桨的74%,相当于“两个人划船,一个人在发力,另一个在‘拖后腿’”。
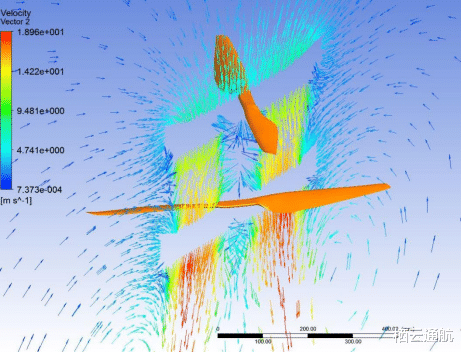
共轴双旋翼气动仿真结果

共轴双旋翼气动结果图
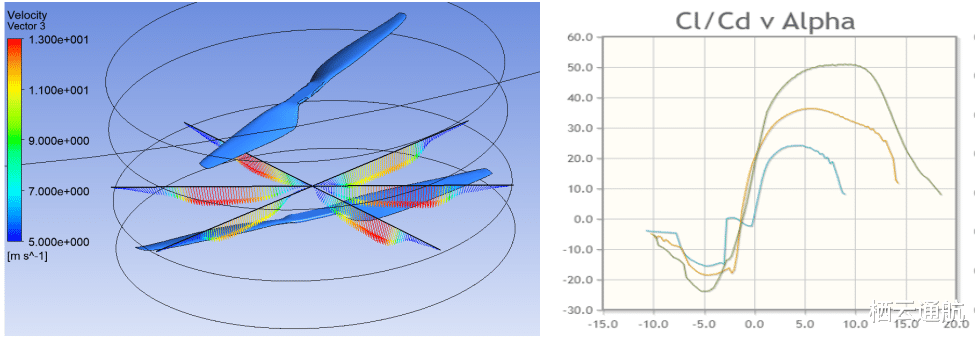
桨间距的“临界值”:团队测试了10cm到25cm的桨间距,发现当间距小于280mm时,上下桨的气流干扰几乎无法避免;只有间距超过280mm,下桨才能跳出上桨的尾流,升力占比才会从74%提升到78%,两桨的阻力也逐渐趋近平衡。

共轴双旋翼上下螺旋桨扰动图
03针对性优化:让每一缕气流都为升力服务
找到瓶颈后,团队开始“对症下药”,从气流调控到结构优化,让共轴双旋翼的气动效率再上一个台阶。
(1)给上下桨“量身定制”攻角
上桨的优化从“角度”入手:团队对比了30x10.5旋翼与常规10.5寸桨的倾转角——在径向80mm处,常规桨的倾转角为27.95°,而桨仅21.3°,这导致部分区域“抓风效率”不足。于是根据不同径向位置的转速(2000-3000RPM)和雷诺数(6.25E+04-3.11E+05),将上桨各截面的倾角调整为5°-9.2°,让每一段桨叶都能在最佳攻角下工作,升阻比显著提升。
螺旋桨桨距优化方案
下桨则针对“来流干扰”单独优化:通过CFD计算发现,上桨的下冲气流会给下桨带来约30°的来流角(β角),导致下桨的实际攻角偏小。团队据此将下桨的攻角修正15°左右,相当于给下桨“装了导航”,让它能顺着气流方向“抓风”,下桨升力比74%提升到77%。

下螺旋桨桨距优化结果
(2)减震:被忽视的“气动帮手”
测试中发现,电机震动会让旋翼的气流轨迹产生偏差——高频震动导致桨叶“轻微抖动”,不仅增加了阻力,还让拉力数据波动达10%。团队在电机座加装橡胶螺柱后,震动明显减弱,数据精度提升,比未减震时再省4%。
(3)电机与桨的“最佳搭档”
经过重重困难和不懈的努力,最终的“黄金组合”浮出水面!
这些优化的背后,是对“每一缕气流”的极致利用——不是堆砌更多电池,而是让共轴双旋翼的每一处设计都顺应空气动力学规律。当蜂鸟在蓝天中持久悬浮时,它不仅证明了共轴技术的潜力,更指明了无人机行业的效率方向:真正的突破,源于对空气动力学的深度掌控。